





人間情報システム部門
実世界コンピューティング(石黒・加納)研究室
| 実世界コンピューティング研究分野 教授 | 石黒 章夫 |
| 実世界数理モデリング研究分野 准教授 | 加納 剛史 |
●四脚動物が示す巧みな足さばきのからくりを探る
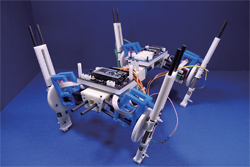
図1:四脚動物が示すさまざまな現象の再現に世界で初めて成功した四脚ロボット
イヌやウマなどの四脚動物は、低速では脚を一本ずつ動かす「ウォーク」、中速では対角の脚が同期する「トロット」、高速では前脚どうしや後脚どうしがほぼ同期する「ギャロップ」など、速度に応じて自発的に足並みを変化させます。この現象は、ちょうど自動車のギアチェンジのように、エネルギー効率を高めるためにも寄与していると考えられています。しかしながら、このような足並みの発現メカニズムはこれまでまったくわかっていませんでした。
当研究室では、これまで謎であったこの現象の発現メカニズムに対して最近一つの解答を与えることに成功しました。それは、きわめてシンプルなアルゴリズムで記述できる分散制御則であり、実際に四脚ロボット(図1)に実装してみたところ、四脚動物と同様に自発的な足並みの変化を再現することに世界で初めて成功しました。この成果は、生物学のみならず、脚式ロボットの基盤技術として応用できることが期待されます。この成果は英国の科学誌Scientific Reports に掲載されました。

- システム・ソフトウェア研究部門
コミュニケーションネットワーク(長谷川・北形)研究室 - ブロードバンド工学研究部門
情報ストレージシステム(田中・グリーブス)研究室 - 情報デバイス研究部門
ナノ集積デバイス・プロセス(佐藤・櫻庭)研究室 - システム・ソフトウェア研究部門
コンピューテイング情報理論(中野)研究室 - ブロードバンド工学研究部門
超高速光通信(廣岡)研究室 - 情報デバイス研究部門
量子デバイス(大塚)研究室 - 人間情報システム部門
実世界コンピューティング(石黒・加納)研究室 - 人間情報システム研究部門
情報コンテンツ研究室(北村研究室) - 研究基盤技術センター
工作部 - 学際科学フロンティア研究所
情報・システム領域 (島津研究室) - サイバーサイエンスセンター
情報通信基盤研究部 (菅沼・阿部研究室) - 人間情報システム研究部門
生体電磁情報(石山・枦)研究室 - 情報デバイス研究部門
物性機能設計(白井)研究室 - ブロードバンド工学研究部門
先端ワイヤレス通信技術(末松・亀田)研究室 - 情報デバイス研究部門
量子光情報工学(枝松・三森・Sadgrove)研究室 - ブロードバンド工学研究部門
応用量子光学(八坂)研究室 - ブレインウェア研究開発施設
新概念VLSIシステム(羽生・夏井)研究室 - ブロードバンド信号研究部門
超ブロードバンド信号処理(尾辻・末光・ボーバンガ)研究室 - 情報デバイス研究部門
ナノフォトエレクトロニクス(上原・片野)研究室 - 人間情報システム研究部門
高次視覚情報システム(塩入・栗木)研究室 - 情報デバイス研究部門
誘電ナノデバイス(長)研究室 - ナノ・スピン実験施設
半導体スピントロニクス(大野)研究室 - 人間情報システム研究部門
先端音情報システム(鈴木・坂本)研究室 - ブロードバンド工学研究部門
超高速光通信(中沢・廣岡・吉田)研究室 - システム・ソフトウェア研究部門
ソフトウェア構成(大堀)研究室
