





1. はじめに
人の運動などを計測する3次元モーションセンサは、人の自然な手・身体の動きやジェスチャを利用して、誰でも直感的にコンピュータやその他の機械を使える未来型のユーザインタフェースを実現する重要な要素技術の1つとして、盛んに利用されてきました。これまで、さまざまな原理に基づくものが提案されてきましたが、いずれも原理上の制約から3次元の運動を計測できる対象に制限があり、利用できる分野は限定的でした。たとえば、道具使用時の細かい手作業中の手指の運動や、土中や障害物の中で動き回わる小動物の運動、互いに複雑に絡み合う多関節物体の動き、流体の3次元的な動きなどを直接計測することはできませんでした。それは、カメラや距離画像入力装置を用いた光学式の手法によるモーションセンサでは、隠れ(オクルージョン)のために計測できない死角があり、複数の指や個体をそれぞれ区別して安定的に計測することが難しかったためです。また交流磁気式の3 次元モーションセンサも幅広く利用されてきましたが、電源供給や通信のために一般にセンサは有線接続されるため、上記のような対象の運動には邪魔になり、これを回避しようと無線通信やバッテリーを搭載すると、センサ自体が大きく重くなって、やはり自由な運動を阻害していました。
そこで我々は、これら従来は計測できなかった対象の3次元の動きを計測できる新しい磁気式モーションセンサシステムを実現する研究を、計測原理を提案した電気通信研究所内の石山・枦研究室と進めてきました。そして、その精度や計算速度を向上させるとともに、これを用いてジェスチャを用いたユーザインタフェースなど、いくつかの分野への応用を図ることを目標として、学内と学外の国内外の研究者との協力で、研究に取り組んでいます。
2. 磁気式3次元モーションセンサシステムの試作
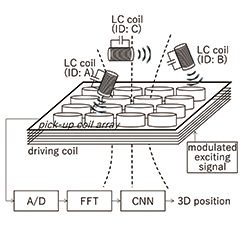
図1 磁気式3次元モーションセンサシステムの原理図
本研究で提案している磁気式3次元モーションセンサシステムの原理を図1に示します。励磁コイル(driving coil)によって生成される磁界中に置かれたLC共振型磁気マーカ(LCコイル)が発する誘導磁界を複数の磁界センサ(pick-up array)で検出し、それらの計測データを基にマーカの3次元位置を特定します。異なる複数の周波数を畳み込んで励磁することにより、これらに対応する複数の共振周波数を持つLCコイル(マーカ)が発する誘導磁界をそれぞれFFT により識別することができます。この際、LCコイルの軸が励磁コイル(driving coil)によって生成される磁界の向きに垂直に近い図1の ID:C のような姿勢の場合、LCコイルを貫く磁束が不足し、計測に十分な強度の誘導磁界を発生できないために、3次元位置を計測できないという問題がありました。
そこで本研究では、機械学習等を用いて安定な解を高速で計算するアルゴリズムを確立することによりこの問題を解決し、あらゆる姿勢のマーカの3次元位置を計測できるシステムを実現することを第1の目的としています。これまでの研究で、各LCコイル(マーカ)を、重さ1g、直径4mm、長さ15mmの小型軽量で作成し、15個までをそれぞれ区別して、1mm程度以下の位置精度で同時に約30Hzで検出できることを確認しています。このシステムのマーカは、ワイヤレスでバッテリーレスで、オクル―ジョンの問題もない等、他に類を見ない大変ユニークな特徴を有しています。そのため、上述のこれまでできなかったモーション計測を可能とする唯一の方法だと言えます。そこで、これらの分野の問題の解決に寄与することを第2の目的としています。

-
 JSTさきがけ
JSTさきがけ
バッテリレス無線センサネットワークのためのポスト量子暗号計算技術 -
 文部科学省 光・量子飛躍フラッグシッププログラム(Q-LEAP)
文部科学省 光・量子飛躍フラッグシッププログラム(Q-LEAP)
光子数識別量子ナノフォトニクスの創成 -
 研究プロジェクト紹介
研究プロジェクト紹介
磁気式3次元モーションセンサシステムの試作とそのさまざまな分野への応用 -
 総長就任挨拶
総長就任挨拶 -
 所長就任挨拶
所長就任挨拶 -
 科学研究費補助金 基盤研究(A)
科学研究費補助金 基盤研究(A)
冗長ガロア体算術に基づくセキュリティハードウェアの高水準設計技術の研究開発 -
 Human Frontier Science Program Robotics-inspired Biology: Decoding Flexibility of Motor Control by Studying Amphibious Locomotion
Human Frontier Science Program Robotics-inspired Biology: Decoding Flexibility of Motor Control by Studying Amphibious Locomotion -
 科学研究費補助金 基盤研究(S)
科学研究費補助金 基盤研究(S)
脳型コンピューティング向け
ダーク・シリコンロジックLSIの基盤技術開発 -
 戦略的創造研究推進事業 さきがけ
戦略的創造研究推進事業 さきがけ
研究領域「社会と調和した情報基盤技術の構築」
視線行動に基づいた心の中の身体の可視化と身体適正化を支援する基盤技術の創成 -
 科学研究費補助金
科学研究費補助金
基盤研究(S)二次元原子薄膜ヘテロ接合の創製とその新原理テラヘルツ光電子デバイス応用 -
 学際研究重点プログラム
学際研究重点プログラム
「ヨッタスケールデータの研究プラットフォームの構築」
http://www.aiic.tohoku.ac.jp -
文部科学省 国家課題対応型開発推進事業『耐災害性に優れた安心・安全社会のためのスピントロニクス材料・デバイス基盤技術の研究開発』
-
本館開所式・創立80周年記念式典
-
文部科学省 未来社会実現のためのICT基盤技術の研究開発
「イノベーション創出を支える情報基盤強化のための新技術開発」
高機能高可用性情報ストレージ基盤技術の開発 -
電気通信研究所本館の竣工
-
 科研費基盤研究(S)「非線形誘電率顕微鏡の高機能化及び電子デバイスへの応用」
科研費基盤研究(S)「非線形誘電率顕微鏡の高機能化及び電子デバイスへの応用」
-
人間的判断の実現に向けた新概念脳型 LSI 創出事業プロジェクト
-
 最先端・次世代研究開発支援プログラム
最先端・次世代研究開発支援プログラム
-
戦略的創造研究推進事業CREST
-
所長就任の挨拶
-
 所長退任の挨拶
所長退任の挨拶
-
 片平キャンパスに
片平キャンパスに
建築される通研新棟 -
 日本学術振興会研究拠点形成事業(先端拠点形成型)
日本学術振興会研究拠点形成事業(先端拠点形成型)
高集積原子制御プロセス
国際共同研究拠点の形成 -
東北大学重点戦略支援プログラム
将来の大学間協定を見据えた
東北大学電気通信研究所 -
特別推進研究
グラフェン・テラヘルツレーザーの創出
