





1.研究内容
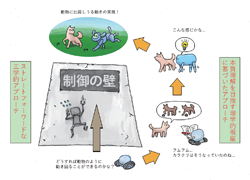
図2 制御の壁を越えるためには、工学的手法のみに頼った力ずくのアプローチではなく、理学的な視座にも基づくことが必要だと考えます。
人工知能技術(AI)は近年、長足の発展を遂げ、その成果に関するニュースを見かけない日はないほど、われわれにとって身近な存在となりつつあります。いまや、囲碁でもAIが名人を打ち負かすに至るまでなっていることをご存知の方も多いでしょう。その一方で、実世界をしなやかかつタフに動き回るロボットは依然として実用化レベルに至っていません。現在最先端のロボットは、昆虫レベルの運動能力すら持つに至っていないのです。なぜでしょうか? それは、現在のAIには「環境とリアルタイムで折り合いをつける適応能力」が完全に欠落しているからです。この能力をロボットに実装するためには、やみくもに工学的アプローチに基づいて制御プログラムを考えるのではなく、このような能力を動物がどのように発現しているのかの理解を目指す、理学的なアプローチにも立脚した方法論を併用することが有効だと思われます(図2参照)。「理解なくして実現なし」というのがわれわれの信念です。単純な神経系しか持たない動物種が実世界環境を苦もなく動き回っていることを考えますと、このような振る舞いの背後には力ずくの計算に頼らない、人知を超えるからくりがあるはずです。これを明らかにすることができれば、工学的に資することはきわめて大きいでしょう。
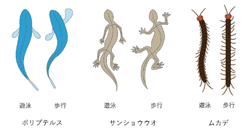
図3 ポリプテルス、サンショウウオ、そしてムカデが示す水陸両用のロコモーション様式。それぞれの動物種において、左が遊泳、右が歩行の際の身体の自由度の使い方を示しています。このように、周囲場の物理的特性に呼応して、身体自由度の使い方を劇的に変化させます。
それではどのようにすれば、このような能力を発現しうるからくりの解明に迫ることができるのでしょうか。われわれは、このような能力があらわに観察できる動物種を見出して、それら特有の振る舞いを突破口にすることを考えました。今回、HFSPに採択されたわれわれのプロジェクトは、水陸両用のロコモーションを示す動物種を突破口として、動物が示す環境とリアルタイムで折り合いをつける能力の解明とロボットへの実装を目的としています。具体的には、サンショウウオ、ポリプテルスと呼ばれるある種の魚、そしてムカデです。これらの動物種は陸上と水上で興味深い振る舞いを見せます。もう少し詳しく説明しましょう。図3に示すように、サンショウウオは地面の上では四肢を使って歩きます。この時、胴体は定在波を発生させて左右にくねり、歩幅を増やしてより効率的な推進を実現しています。一方、水中では、四肢を胴体に近づけて抵抗を減らしつつ、胴体に頭部から尾部に向けて進行波を発生させて泳ぐのです。ポリプテルスは、水中では頭部から尾部に向けて進行波を発生させて泳ぐのですが、地面があると、胸びれを肢として活用して歩行します。脚が20対以上あるムカデはどうでしょうか? 地面ではこれらの脚を巧みに協調させて歩くのですが、水の上に置くとサンショウウオと同じように、なんと脚をたたんで胴体に進行波を生成して泳ぐのです! つまり、水陸両用のロコモーションを示すこれらの動物種は、培地の物理的特性の変化に呼応して、身体にある自由度の使い方を劇的に変化させて適応するわけです。そのため、このような現象には動物が示す環境適応能力のからくりが凝縮されており、これを糸口にして適応能力に内在する制御原理に肉薄するというのがわれわれの作戦なのです。このようなアプローチを通して、既存技術では決して成し得なかった、優れた環境適応能力を有する自律移動ロボットの創成につなげたいと考えています。

-
 JSTさきがけ
JSTさきがけ
バッテリレス無線センサネットワークのためのポスト量子暗号計算技術 -
 文部科学省 光・量子飛躍フラッグシッププログラム(Q-LEAP)
文部科学省 光・量子飛躍フラッグシッププログラム(Q-LEAP)
光子数識別量子ナノフォトニクスの創成 -
 研究プロジェクト紹介
研究プロジェクト紹介
磁気式3次元モーションセンサシステムの試作とそのさまざまな分野への応用 -
 総長就任挨拶
総長就任挨拶 -
 所長就任挨拶
所長就任挨拶 -
 科学研究費補助金 基盤研究(A)
科学研究費補助金 基盤研究(A)
冗長ガロア体算術に基づくセキュリティハードウェアの高水準設計技術の研究開発 -
 Human Frontier Science Program Robotics-inspired Biology: Decoding Flexibility of Motor Control by Studying Amphibious Locomotion
Human Frontier Science Program Robotics-inspired Biology: Decoding Flexibility of Motor Control by Studying Amphibious Locomotion -
 科学研究費補助金 基盤研究(S)
科学研究費補助金 基盤研究(S)
脳型コンピューティング向け
ダーク・シリコンロジックLSIの基盤技術開発 -
 戦略的創造研究推進事業 さきがけ
戦略的創造研究推進事業 さきがけ
研究領域「社会と調和した情報基盤技術の構築」
視線行動に基づいた心の中の身体の可視化と身体適正化を支援する基盤技術の創成 -
 科学研究費補助金
科学研究費補助金
基盤研究(S)二次元原子薄膜ヘテロ接合の創製とその新原理テラヘルツ光電子デバイス応用 -
 学際研究重点プログラム
学際研究重点プログラム
「ヨッタスケールデータの研究プラットフォームの構築」
http://www.aiic.tohoku.ac.jp -
文部科学省 国家課題対応型開発推進事業『耐災害性に優れた安心・安全社会のためのスピントロニクス材料・デバイス基盤技術の研究開発』
-
本館開所式・創立80周年記念式典
-
文部科学省 未来社会実現のためのICT基盤技術の研究開発
「イノベーション創出を支える情報基盤強化のための新技術開発」
高機能高可用性情報ストレージ基盤技術の開発 -
電気通信研究所本館の竣工
-
 科研費基盤研究(S)「非線形誘電率顕微鏡の高機能化及び電子デバイスへの応用」
科研費基盤研究(S)「非線形誘電率顕微鏡の高機能化及び電子デバイスへの応用」
-
人間的判断の実現に向けた新概念脳型 LSI 創出事業プロジェクト
-
 最先端・次世代研究開発支援プログラム
最先端・次世代研究開発支援プログラム
-
戦略的創造研究推進事業CREST
-
所長就任の挨拶
-
 所長退任の挨拶
所長退任の挨拶
-
 片平キャンパスに
片平キャンパスに
建築される通研新棟 -
 日本学術振興会研究拠点形成事業(先端拠点形成型)
日本学術振興会研究拠点形成事業(先端拠点形成型)
高集積原子制御プロセス
国際共同研究拠点の形成 -
東北大学重点戦略支援プログラム
将来の大学間協定を見据えた
東北大学電気通信研究所 -
特別推進研究
グラフェン・テラヘルツレーザーの創出
