- >> Human and Bio Information Systems Division
-
Realーworld computing
Researcher
- [ Professor ]
Akio Ishiguro - [ Assistant Professor ]
Akira Fukuhara - [ Assistant Professor* ]
Kotaro Yasui - [ Assistant Professor ]
- Shura Suzuki
Group Web Site
https://www.cmplx.riec.tohoku.ac.jp/
Research Activities
Our laboratory aims to understand essential mechanisms underlying various natural and social systems from the viewpoint of autonomous decentralized control,* and to establish design principles of artificial agents.
- Autonomous decentralized control: Control scheme in which non-trivial macroscopic functionalities emerge from interactions among individual components.
Real-World Computing (Prof. Ishiguro)
Research topics
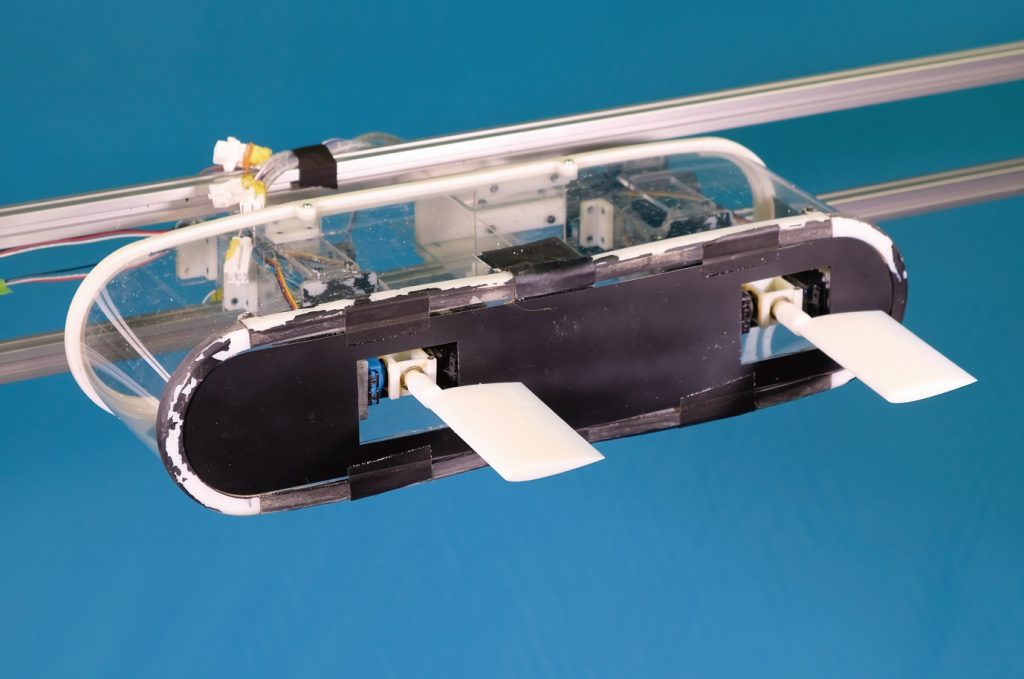
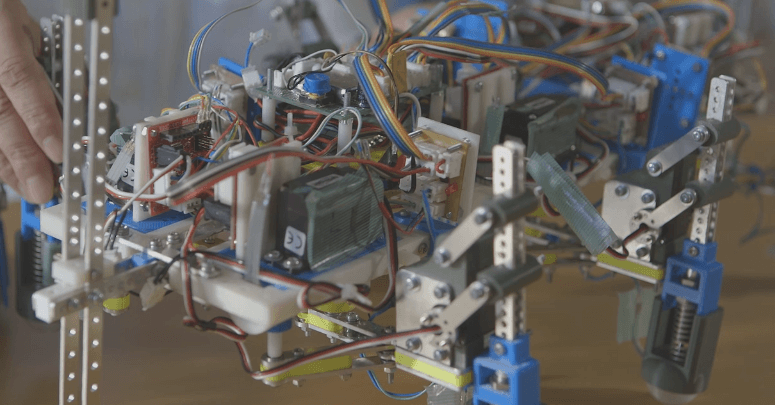
- Control of soft-bodied robots with large degrees of bodily freedom
- Optimization algorithm and its application to VLSI design methodology
- Dynamical system approach to understand versatility behavioral and its application to robotics
Living organisms exhibit surprisingly adaptive and versatile behaviors in real time under unpredictable and unstructured real world constraints. Clarifying these remarkable abilities enable us to understand life-like complex adaptive systems as well as to construct truly intelligent artificial systems. We study the design principles of autonomous decentralized systems that exhibit life-like resilient behaviors from the viewpoints of robotics, biology, mathematics, nonlinear science, and physics.