- >> 人間・生体情報システム研究部門
-
実世界コンピューティング研究室
教員
[ 教授 ] 石黒 章夫
[ 助教 ] 福原 洸
[ 助教(兼)] 安井浩太郎
[ 助教 ] 鈴木 朱羅
研究室HP
https://www.cmplx.riec.tohoku.ac.jp/jp/
研究活動
実世界コンピューティング研究室では、自然界や社会システムにおける諸現象の発現メカニズムを自律分散制御*の観点から理解し、人工物の設計論へと昇華することを目的として研究を行っている。
*自律分散制御:単純な認知 ・ 判断 ・ 運動機能を持つ要素(自律個)が相互作用することによって、個々の要素の単純性からは想像もできない非自明な大域的特性(機能)を創発させるという、「三人寄れば文殊の知恵」をまさに地でいくような制御方策。
実世界コンピューティング研究分野|石黒教授
研究テーマ
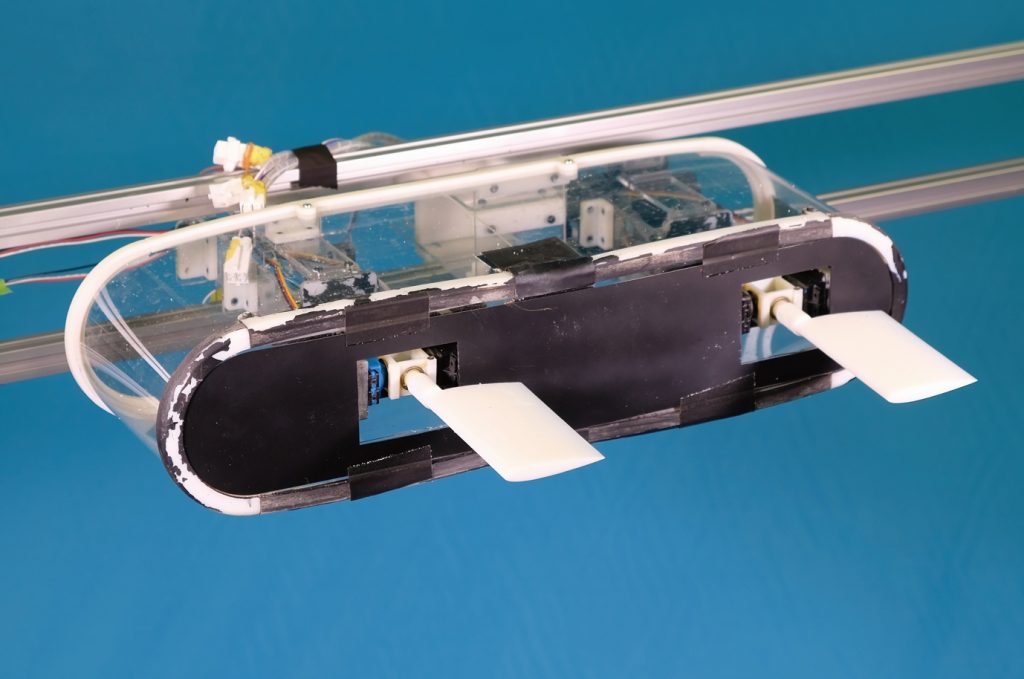
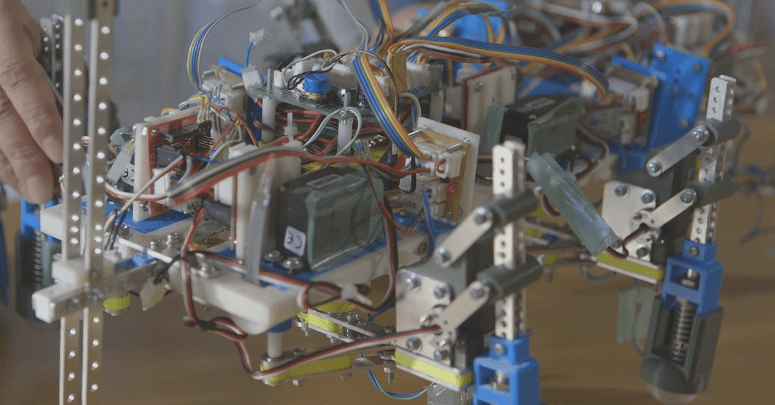
- 超大自由度ソフトロボットの制御
- 這行や遊泳、飛行、歩行、走行における自律分散制御
- 多芸多才な振る舞いの発現原理の力学的解明とロボティクスへの応用
実世界コンピューティング研究分野では、生物のようにしなやかかつタフに実世界環境に適応可能な「生き生きとしたシステム」の設計原理の理解を目指した研究を進めている。ロボティクスや数理科学、生物学、物理学といったさまざまな学問領域を縦横無尽に行き来しながら、既存技術では決してなし得ない、生物のような「しぶとさ」や「したたかさ」、「打たれ強さ」、「多芸多才さ」を有する知的人工物システムの創成を目指す。